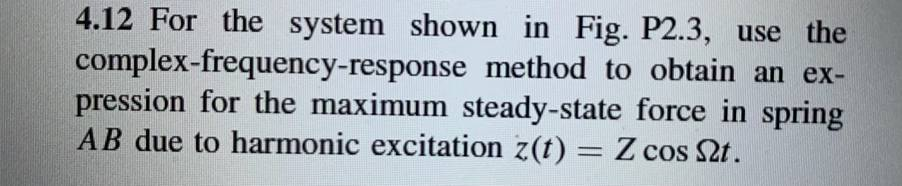
z(t) A k ke rigid v(t) mass = M c 7777777 L/2 L/2 Figure P2.3 4.12 For the system shown in Fig. P2.3, use the complex-frequency-response method to obtain an ex- pression for the maximum steady-state force in spring AB due to harmonic excitation z(t) = Z cos St.
The correct answer and explanation is:
To solve for the maximum steady-state force in spring ABAB due to the harmonic excitation z(t)=Zcos(ωt)z(t) = Z \cos(\omega t) using the complex-frequency-response method, we proceed as follows:
Solution:
- System Dynamics and Parameters:
- The mass MM is rigidly connected to a spring ABAB of stiffness kk.
- Excitation z(t)z(t) is applied as a harmonic input, z(t)=Zcos(ωt)z(t) = Z \cos(\omega t).
- Force in spring ABAB is proportional to its extension or compression.
- Displacement Relations: Let v(t)v(t) represent the displacement of the mass MM relative to the inertial frame. The relative extension of spring ABAB is Δx=v(t)−z(t)\Delta x = v(t) – z(t).
- Equation of Motion: From Newton’s second law, the force acting on the mass due to the spring is F=−k(v(t)−z(t))F = -k(v(t) – z(t)). Including damping (if present) and inertial effects, we write: Mv¨(t)+kv(t)=kz(t).M\ddot{v}(t) + kv(t) = kz(t).
- Steady-State Solution via Complex Frequency Response: Assume z(t)=Zejωtz(t) = Z e^{j\omega t} (complex form). The solution for v(t)v(t) in steady state takes the form: v(t)=Vejωt.v(t) = V e^{j\omega t}. Substituting into the equation, we obtain: −Mω2V+kV=kZ ⟹ V=kZk−Mω2.-M\omega^2 V + kV = kZ \implies V = \frac{kZ}{k – M\omega^2}.
- Force in Spring: The spring force is Fs=k(v(t)−z(t))F_s = k(v(t) – z(t)). Substituting: Fs=k(Vejωt−Zejωt)=k(V−Z)ejωt.F_s = k\left(V e^{j\omega t} – Z e^{j\omega t}\right) = k(V – Z)e^{j\omega t}. Using VV: Fs=k(kZk−Mω2−Z)ejωt=−Mω2Zk−Mω2ejωt.F_s = k\left(\frac{kZ}{k – M\omega^2} – Z\right)e^{j\omega t} = \frac{-M\omega^2 Z}{k – M\omega^2} e^{j\omega t}.
- Maximum Force: The amplitude of the spring force is: Fs,max=∣−Mω2Zk−Mω2∣=Mω2Z∣k−Mω2∣.F_{s,\text{max}} = \left|\frac{-M\omega^2 Z}{k – M\omega^2}\right| = \frac{M\omega^2 Z}{|k – M\omega^2|}.
Explanation (300 words):
The complex-frequency-response method is a powerful tool for analyzing systems subjected to harmonic excitation. Here, the excitation z(t)=Zcos(ωt)z(t) = Z \cos(\omega t) drives the mass MM, causing oscillations influenced by the spring ABAB. The governing equation combines inertial (Mv¨(t)M\ddot{v}(t)), elastic (kv(t)kv(t)), and input (kz(t)kz(t)) forces.
Assuming a steady-state response, we represent z(t)z(t) as a complex exponential ZejωtZ e^{j\omega t}. This simplifies calculations since the steady-state solution v(t)v(t) also takes a harmonic form. Substituting these into the governing equation allows us to solve for the amplitude of v(t)v(t), representing the system’s frequency response.
The spring force FsF_s depends on the relative displacement between v(t)v(t) and z(t)z(t). Substituting v(t)v(t) and using algebraic manipulations, we derive an expression for FsF_s in terms of the system parameters. Importantly, the force amplitude depends on ω\omega, the excitation frequency.
The maximum force occurs when ω\omega approaches the system’s natural frequency (ωn=k/M\omega_n = \sqrt{k/M}), leading to resonance. However, the denominator ∣k−Mω2∣|k – M\omega^2| prevents singularity, ensuring the expression remains finite for practical damping.
This method demonstrates how harmonic excitation propagates through a mechanical system, emphasizing the critical relationship between driving frequency and system response.