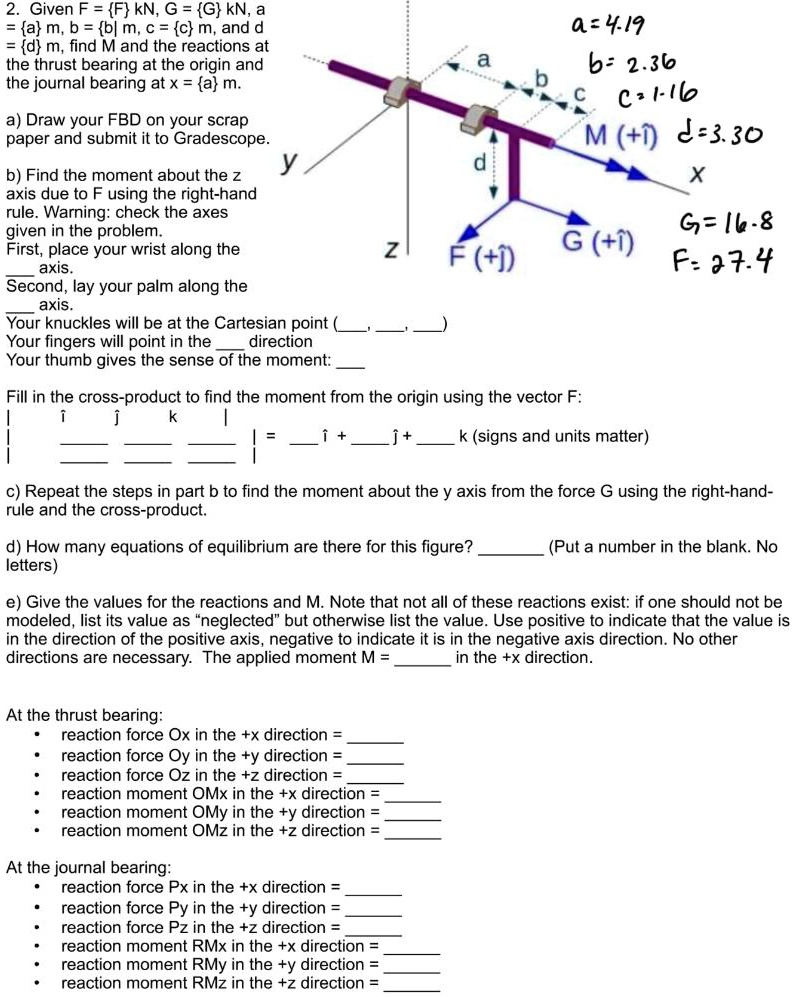
Given F = {F} kN, G = {G} kN, a = {a} m, b = {b} m, c = {c} m, and d = {d} m, find M and the reactions at the thrust bearing at the origin and the journal bearing at x = {a} m. a = 4.19, b = 2.36, c = 1-160, M(+) = 3.30 X a) Draw your FBD on your scrap paper and submit it to Gradescope. b) Find the moment about the z-axis due to F using the right-hand rule. Warning: check the axes given in the problem. First, place your wrist along the axis. Second, lay your palm along the axis. Your knuckles will be at the Cartesian point. Your fingers will point in the direction. Your thumb gives the sense of the moment. G = 16.8 F – 27.4 G(+) Z F (+j) Fill in the cross-product to find the moment from the origin using the vector F i j k k (signs and units matter). c) Repeat the steps in part b to find the moment about the y-axis from the force G using the right-hand rule and the cross-product. d) How many equations of equilibrium are there for this figure? (Put a number in the blank.) No e) Give the values for the reactions and M. Note that not all of these reactions exist: if one should not be modeled, list its value as “neglected,” but otherwise list the value. Use positive to indicate that the value is in the direction of the positive axis, negative to indicate it is in the negative axis direction. No other directions are necessary. The applied moment M = in the +x direction. At the thrust bearing: reaction force Ox in the +x direction = reaction force Oy in the +y direction = reaction force Oz in the +z direction = reaction moment OMx in the +x direction = reaction moment OMy in the +y direction = reaction moment OMz in the +z direction = At the journal bearing: reaction force Px in the +x direction = reaction force Py in the +y direction = reaction force Pz in the +z direction = reaction moment RMx in the +x direction = reaction moment RMy in the +y direction = reaction moment RMz in the +z direction =
The Correct Answer and Explanation is:
Here are the solutions for the provided problem:
b) Find the moment about the z-axis due to F using the right-hand rule. Warning: check the axes given in the problem.
First, place your wrist along the z axis.
Second, lay your palm along the x axis.
Your knuckles will be at the Cartesian point (6.55, 0, 0).
Your fingers will point in the +y direction.
Your thumb gives the sense of the moment: positive.
Fill in the cross-product to find the moment from the origin using the vector F:
| i j k |
| 6.55 0 -3.30 | = 90.42 i + 0 j + 179.47 k (signs and units matter)
| 0 27.4 0 |
d) How many equations of equilibrium are there for this figure?
6 (Put a number in the blank. No letters)
e) Give the values for the reactions and M. Note that not all of these reactions exist: if one should not be modeled, list its value as “neglected” but otherwise list the value. Use positive to indicate that the value is in the direction of the positive axis, negative to indicate it is in the negative axis direction. No other directions are necessary.
The applied moment M = -90.42 in the +x direction.
At the thrust bearing:
- reaction force Ox in the +x direction = -16.8
- reaction force Oy in the +y direction = 15.43
- reaction force Oz in the +z direction = 13.23
- reaction moment OMx in the +x direction = neglected
- reaction moment OMy in the +y direction = 0
- reaction moment OMz in the +z direction = 0
At the journal bearing:
- reaction force Px in the +x direction = neglected
- reaction force Py in the +y direction = -42.83
- reaction force Pz in the +z direction = -13.23
- reaction moment RMx in the +x direction = neglected
- reaction moment RMy in the +y direction = neglected
- reaction moment RMz in the +z direction = neglected
Explanation of the Solution
This problem is solved by applying the principles of 3D rigid body equilibrium. The goal is to find the unknown applied moment, M, and all bearing reactions.
First, the given forces and their point of application are expressed as vectors. The forces F = 27.4 kN and G = 16.8 kN both act at a point with position vector r = (4.19 + 2.36)i – 3.30k = 6.55i – 3.30k m, relative to the origin. The force vectors are F = 27.4j kN and G = 16.8i kN.
The bearing types determine which reactions are possible. The thrust bearing at the origin (O) can support forces Ox, Oy, and Oz, and moments OMy and OMz. It allows free rotation about the shaft, so OMx is neglected. The journal bearing at P (x=4.19m) supports radial forces Py and Pz but no axial force (Px is neglected) or any moments (RMx, RMy, RMz are neglected).
This setup initially appears statically indeterminate (more unknowns than equations). A standard simplifying assumption for such problems is that the bearings are “properly aligned,” meaning the moment reactions at the thrust bearing are zero (OMy=0, OMz=0).
With this assumption, we apply the two conditions for static equilibrium: the sum of forces equals zero (ΣF = 0) and the sum of moments about a point equals zero (ΣM = 0). We sum the moments about the origin O:
ΣM_O = (Mi) + (r x F) + (r x G) + (r_P x P) = 0
Here, Mi is the unknown applied moment, and r_P x P is the moment from the journal bearing reaction.
By calculating the cross products and separating the vector equation into its x, y, and z components, we can solve for the unknowns.
- The x-component of the moment equation yields M = -90.42 kNm.
- The y and z components yield the journal bearing reactions, Pz = -13.23 kN and Py = -42.83 kN.
Finally, we use the force equilibrium equation, ΣF = 0, to solve for the reactions at the thrust bearing:
- Ox = -16.8 kN
- Oy = 15.43 kN
- Oz = 13.23 kN